Kontrol Sistemlerine Giriş: Çalışması, Türleri ve Uygulamaları
Bir makine sıcaklık, hız veya seviye gibi bir değeri otomatik olarak sabit tuttuğunda kontrol sistemlerini kullanırsınız.Bu makalede bir kontrol sisteminin ne olduğu, parçalarının birlikte nasıl çalıştığı ve geri bildirimin çıktıyı nasıl doğru tuttuğu açıklanmaktadır.Ayrıca ana sistem türlerini ve bunların çalışma sırasında nasıl davrandığını da göreceksiniz.Ortak kullanımlar, faydalar ve sınırlar dahildir.Katalog
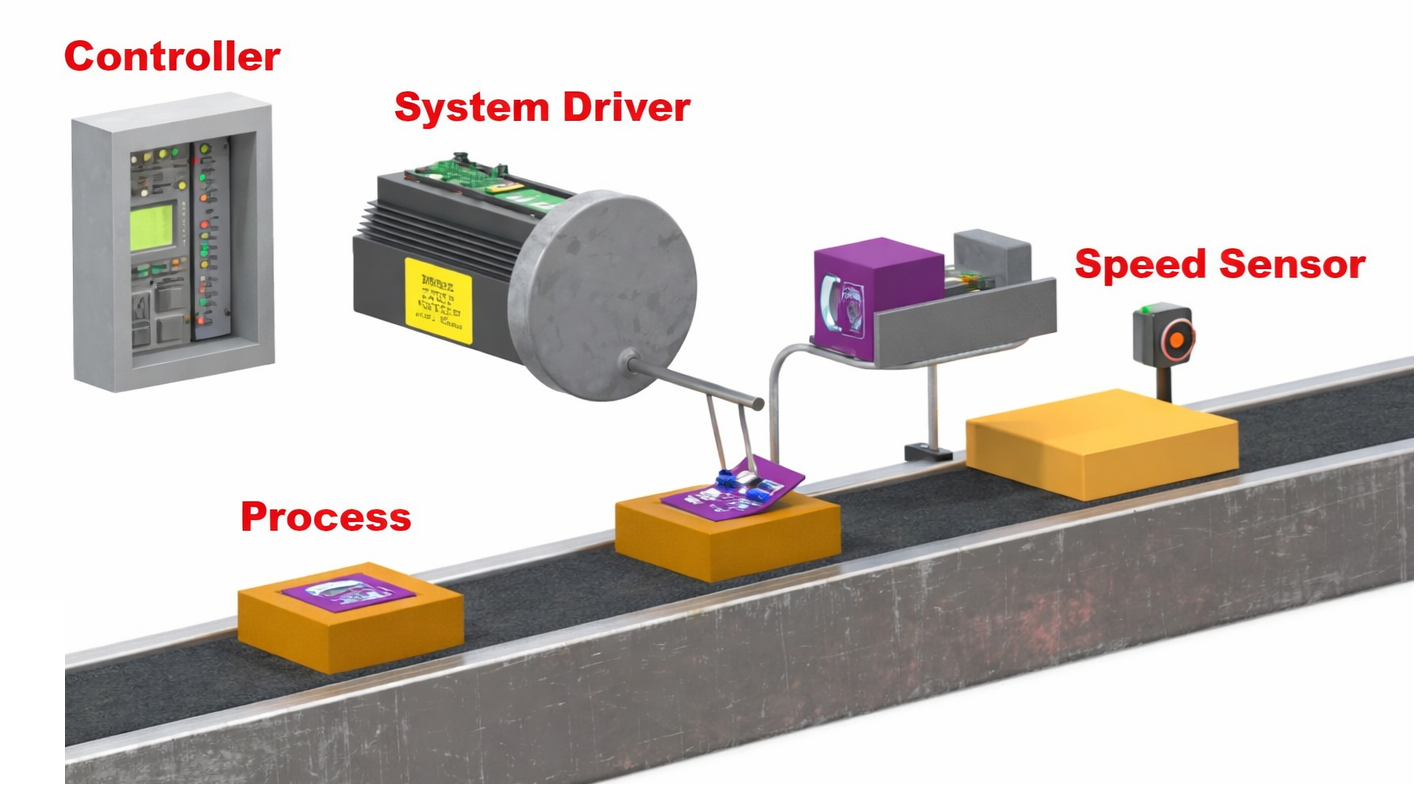
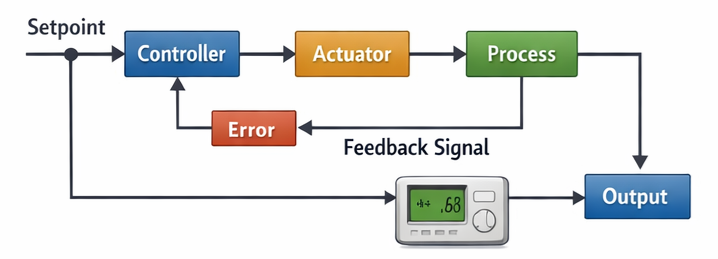
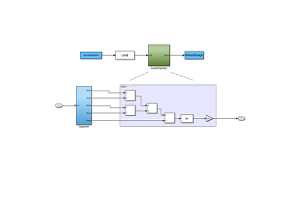
Şekil 1. Kontrol Sistemi Örneği
Kontrol Sistemi Nedir?
Kontrol sistemi, ölçülen değeri istenen hedef değere yakın tutan bir sistemdir.Amacı, koşullar değişse bile çıktının doğru kalmasını sağlayacak şekilde bir süreci otomatik olarak ayarlamaktır.Örneğin, bir oda termostatı sıcaklığı ayarlanan seviyeye yakın tutar ve bir araba hız kontrolü, aracı seçilen hızda tutar.Su deposu seviye kontrolörü aynı zamanda su yüksekliğini seçilen işarette tutar.Basit bir ifadeyle, bir kontrol sistemi bir değişkeni gerekli değere uyacak şekilde sürekli olarak kontrol eder ve düzeltir.
Bir Kontrol Sisteminin Temel Unsurları
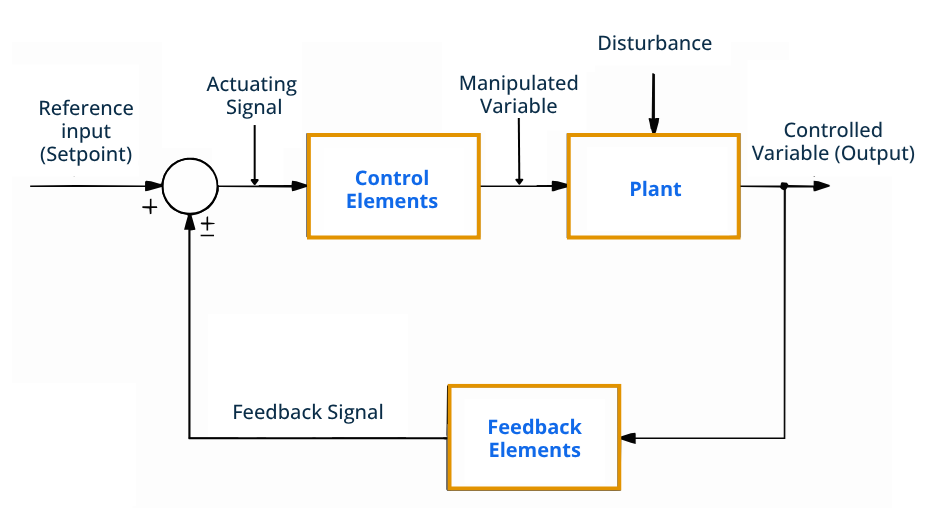
Şekil 2. Kontrol Sistemi Blok Şeması
Bir kontrol sistemi, her biri belirli bir görevi yerine getiren birkaç standart parçadan oluşur.
• Referans Girişi (Ayar Noktası)
Bu, sistemin korumaya çalıştığı istenen değerdir.Seçilen hedef koşulu temsil eder.Sistem her zaman gerçek değeri bu referansla karşılaştırır.
• Çalıştırma Sinyali
Bu istenen ve gerçek değerlerin karşılaştırılması sonrasında üretilen sinyaldir.Ne kadar ayarlama yapılması gerektiğini temsil eder.Sinyal sistemi düzeltmeye hazırlar.
• Kontrol Elemanları
Bu parçalar karar verme sürecini yönetir.Alınan sinyale göre düzeltici eylemi belirlerler.Bu aşamanın çıktısı süreci ayarlamaya hazırlar.
• Manipüle Edilmiş Değişken
Bu, sürece gönderilen ayarlanabilir miktardır.Bu değerin değiştirilmesi nihai çıktıyı etkiler.Sistemin doğrudan değiştirebileceği değişkendir.
• bitki
Tesis kontrol edilen süreçtir.Nihai çıktı değerini üretir.Sistem bu çıktıyı istenilen seviyede tutmayı amaçlamaktadır.
• Rahatsızlık
Bu, süreci etkileyen istenmeyen bir değişikliktir.Çıktıyı istenilen değerden uzaklaştırabilir.Sistemin bunu telafi etmesi gerekiyor.
• Kontrollü Değişken (Çıktı)
Bu, sürecin ölçülen gerçek sonucudur.Sistemin mevcut durumunu gösterir.Amaç bunu referans girişine eşit tutmaktır.
• Geri Bildirim Öğeleri
Bunlar çıktıyı ölçer ve bilgileri kontrol için geri gönderir.Sistemin mevcut durumunu sağlarlar.Bu, düzeltmenin belirlenmesine olanak sağlar.
• Geri Bildirim Sinyali
Bu, çıkış değeri hakkında döndürülen bilgidir.Sürecin durumunu temsil eder.Sistem bunu karşılaştırma için kullanır.
Kontrol Sisteminin Çalışma Prensibi
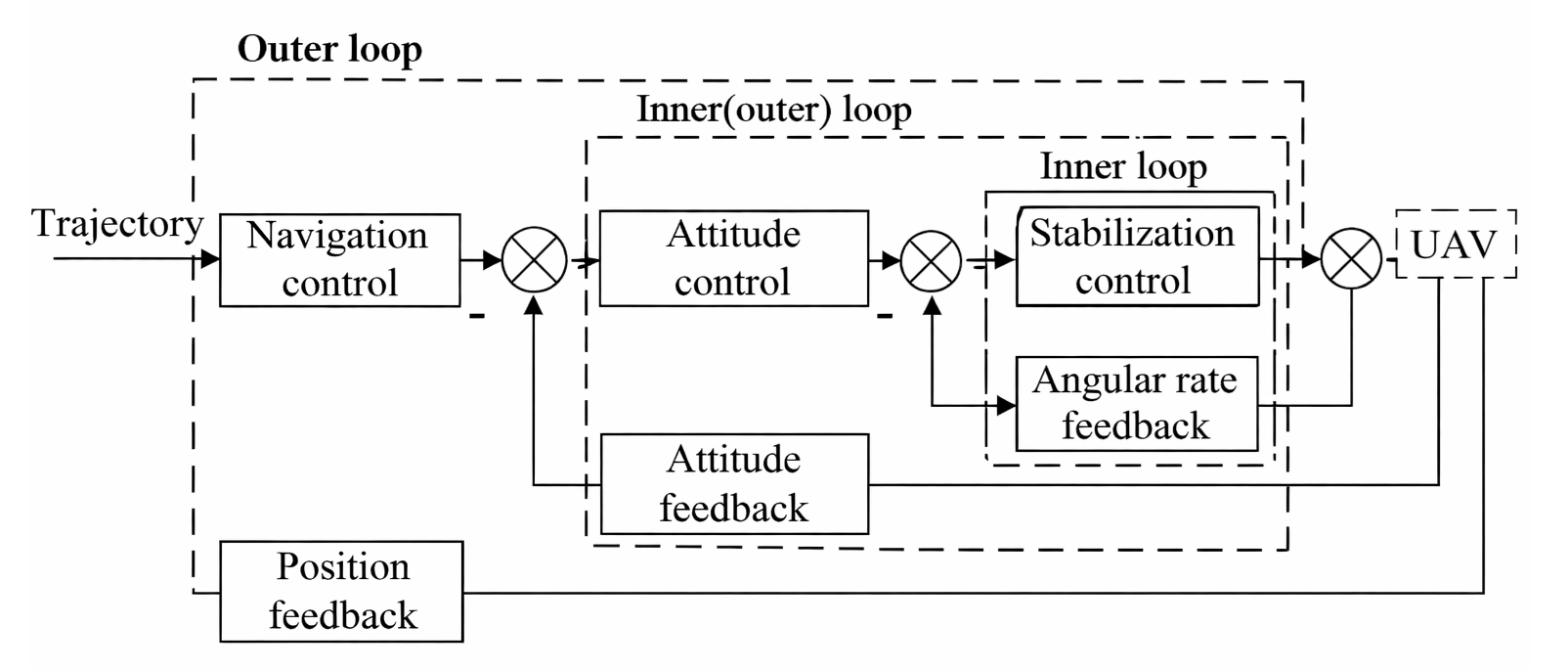
Şekil 3. Kontrol Sisteminin Çalışma Prensibi
Bir kontrol sisteminin çalışma prensibi sisteme istenen bir giriş değerinin verilmesiyle başlar.Sistem daha sonra bu değeri gerçek çıkış değeriyle karşılaştırır.Aralarındaki farka hata sinyali denir.Hata mevcutsa sistem bir düzeltme sinyali üretir.Bu düzeltme, hatayı azaltacak şekilde süreci ayarlar.Çıkış değişir ve sürekli olarak tekrar kontrol edilir.Döngü, çıktı istenen değerle yakından eşleşene kadar tekrarlanır.
Kontrol Sistemlerinin Özellikleri
Kontrol sistemleri, çalışma sırasında ne kadar iyi performans gösterdikleri temel alınarak değerlendirilir.Bu özellikler sistem yanıtının kalitesini ve güvenilirliğini tanımlar.
|
Özellikler |
Açıklama |
|
Kararlılık |
Çıkış yapar
ayrılmamak;bozulmadan sonra sabit değere döner |
|
doğruluk |
Son hata ≤
Ayarlanan değerin ±%2–5'i |
|
Hassasiyet |
Çıkış
aynı giriş altında değişim ≤ ±%1 |
|
Tepki Süresi
|
Başlangıç
reaksiyon ölçülen gecikme süresi (td) içerisinde gerçekleşir |
|
Yükselme Zamanı |
%10'dan başlayan süre
Nihai değerin %90'ına kadar |
|
Yerleşme Zamanı |
Girer ve
±%2 bandında kalır |
|
Aşım |
Zirve aşılıyor
% miktara göre nihai değer |
|
Kararlı Durum
Hata |
Sabit
stabilizasyondan sonra kalan ofset |
|
Hassasiyet |
ΔÇıkış /
ΔParametre değişim oranı |
|
Sağlamlık |
korur
rahatsızlık değişikliğine rağmen çalışma |
|
Bant genişliği |
Çalışır
etkili bir şekilde −3 dB'ye kadar kesme frekansı |
|
Tekrarlanabilirlik |
Aynı giriş
tolerans dahilinde aynı çıktıyı üretir |
|
Güvenilirlik |
Çalışır
Nominal çalışma süresi (MTBF) boyunca hatasız |
|
Sönümleme |
Salınım
sönümleme oranı ζ tarafından belirlenen bozulma |
|
Hızı
Yanıt |
Toplam süre
istikrarlı duruma ulaşmak |
Kontrol Sistemi Türleri
Kontrol sistemleri bilgiyi, sinyalleri ve yanıt davranışını nasıl ele aldıklarına göre sınıflandırılır.Geri bildirim kullanımına, sinyal formuna ve matematiksel davranışa göre gruplandırılırlar.
Açık Döngü Kontrol Sistemi
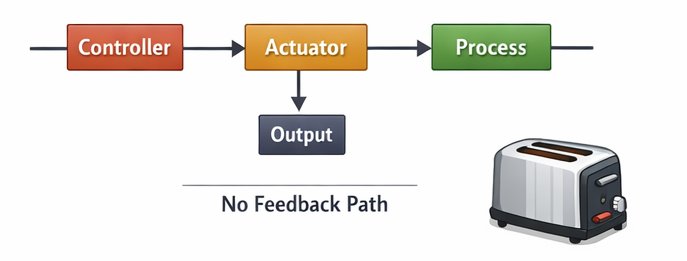
Şekil 4. Açık Döngü Kontrol Sistemi Şeması
Açık döngü kontrol sistemi, çıkışın kontrol eylemini etkilemediği bir sistemdir.Sistem bir komut gönderir ve kontrol etmeden sonucun doğru olduğunu varsayar.Geri bildirim yolu olmadığından hataları veya bozuklukları otomatik olarak düzeltemez.Performans esas olarak uygun kalibrasyon ve çalışma koşullarına bağlıdır.Bu sistemler basit, düşük maliyetli ve tasarımı kolaydır.Ancak yükteki veya ortamdaki değişiklikler nihai sonucu etkileyebilir.Yaygın örnekler arasında elektrikli ekmek kızartma makinesi zamanlayıcısı, çamaşır makinesi zamanlayıcı kontrolü ve sabit sulama zamanlayıcısı yer alır.
Kapalı Çevrim Kontrol Sistemi
Şekil 5. Kapalı Çevrim Kontrol Sistemi Şeması
Kapalı döngü kontrol sistemi, çıkışını otomatik olarak ayarlamak için geri bildirimi kullanan bir sistemdir.Sistem sonucu ölçer ve istenen değerle karşılaştırır.Eğer fark ortaya çıkarsa hatayı azaltmak için düzeltme uygulanır.Bu sürekli ayar, koşullar değişse bile doğru ve kararlı çalışmaya olanak tanır.Kapalı döngü sistemleri, açık döngü sistemlerine göre daha iyi hassasiyet ve güvenilirlik sağlar.Modern otomatik kontrol uygulamalarında yaygın olarak kullanılırlar.Tipik örnekler arasında klima sıcaklık kontrolü, araç hız kontrolü ve otomatik voltaj regülatörleri bulunur.
Sürekli Zamanlı Kontrol Sistemi

Şekil 6. Sürekli Zamanlı (Analog) Kontrol Sinyali
Sürekli zamanlı kontrol sistemi, zaman içinde sorunsuz şekilde değişen sinyalleri işler.Giriş ve çıkış her an kesintisiz olarak mevcuttur.Bu sistemler genellikle analog elektriksel veya mekanik sinyallerle çalışır.Sinyaller sürekli olduğundan yanıt da düzgün ve doğaldır.Sürekli zamanlı sistemler genellikle geleneksel analog kontrolörlerde bulunur.Anında reaksiyon gerektiren fiziksel işlemler için uygundurlar.Örnekler arasında analog hız regülatörleri, ses amplifikatörü ses kontrolü ve hidrolik valf konum kontrolü yer alır.
Ayrık Zamanlı Kontrol Sistemi
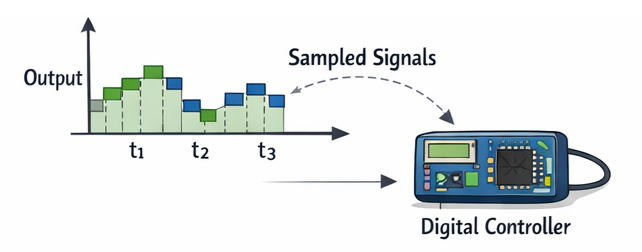
Şekil 7. Ayrık Zamanlı (Dijital) Kontrol Sinyali
Ayrık zamanlı bir kontrol sistemi, örneklenmiş veri sinyallerini kullanarak çalışır.Sistem değerleri yalnızca belirli zaman aralıklarında kontrol eder ve günceller.Bu sinyaller genellikle dijital kontrolörler veya mikroişlemciler tarafından işlenir.Çıktı sürekli olarak değil, adım adım değişir.Bu tür sistemler programlanabilir çalışmaya ve esnek ayarlamaya olanak tanır.Modern elektronik ve bilgisayar tabanlı kontrolde yaygın olarak kullanılırlar.Örnekler arasında mikro denetleyici tabanlı sıcaklık kontrolü, dijital motor hızı kontrolü ve akıllı ev termostatları yer alır.
Lineer Kontrol Sistemi
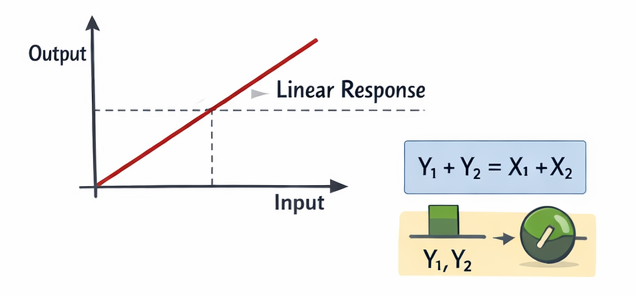
Şekil 8. Doğrusal Sistem Giriş-Çıkış İlişkisi
Doğrusal bir kontrol sistemi, giriş ve çıkış arasındaki orantılı ilişkiyi takip eder.Girdi iki katına çıkarsa, aynı koşullar altında çıktı da iki katına çıkar.Bu sistemler, birleştirilmiş girdilerin birleştirilmiş çıktılar ürettiği süperpozisyon ilkesini karşılar.Doğrusal davranış öngörülebilir ve kolay matematiksel analize olanak tanır.Çoğu teorik kontrol tasarımı, basitlik açısından doğrusal çalışmayı varsayar.Doğrusal modeller kararlı ve doğru sistemlerin tasarlanmasına yardımcı olur.Örnekler arasında küçük sinyalli elektronik amplifikatörler ve düşük yüklü motor kontrol bölgeleri bulunur.
Doğrusal Olmayan Kontrol Sistemi
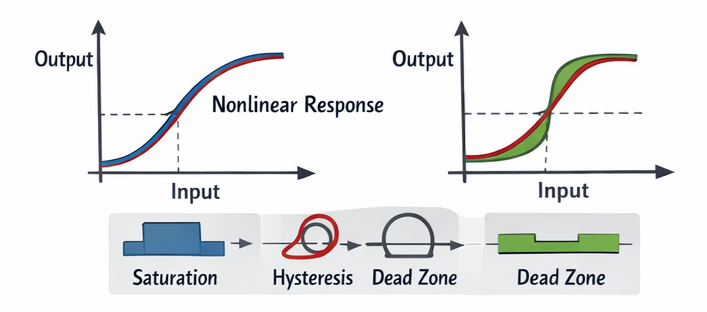
Şekil 9. Doğrusal Olmayan Sistem Yanıt Özellikleri
Doğrusal olmayan bir kontrol sisteminin, girişle orantılı olmayan bir çıkışı vardır.Yanıt, çalışma aralığına veya koşullara bağlı olarak değişir.Küçük girdi değişiklikleri, büyük çıktı değişimlerine neden olabilir veya hiç değişiklik olmayabilir.Doygunluk, histerezis ve ölü bölgeler gibi etkiler sıklıkla ortaya çıkar.Bu sistemlerin analiz edilmesi daha zordur ancak fiziksel süreçleri daha doğru bir şekilde temsil eder.Birçok sistem doğal olarak doğrusal olmayan bir şekilde davranır.Örnekler arasında robotik kol hareket sınırları, manyetik aktüatör davranışı ve aşırı konumlarda valf akış kontrolü yer alır.
Kontrol Sistemlerinin Avantajları ve Dezavantajları
Kontrol sistemleri tutarlılığı artırır ve manuel çabayı azaltır, ancak aynı zamanda karmaşıklığa ve maliyete de neden olur.
Kontrol Sistemlerinin Avantajları
• Sistem çalışma esnasında çıkışı istenilen değere yakın tutar.
• Operatörlerin ekipmanı elle ayarlamaya devam etmesine gerek yoktur.
• Makineler sık sık durmadan uzun saatler boyunca çalışabilir.
• Sistem koşullardaki değişiklikleri otomatik olarak düzeltir.
• Çalışma durumu bir panelden veya uzak ekrandan kontrol edilebilir.
Kontrol Sistemlerinin Dezavantajları
• Kurulum maliyeti basit manuel sistemlere göre daha yüksektir.
• Kurulum ve servis için vasıflı işçilere ihtiyaç vardır.
• Sensörler ve elektronik parçalar zamanla arızalanabilir.
• Sorunların nedenini bulmak daha uzun sürebilir.
• Sistem sabit elektrik gücüne bağlıdır.
Kontrol Sistemleri Uygulamaları
Kontrol sistemleri, otomatik olarak düzgün çalışmayı sürdürmek için hem endüstriyel otomasyonda hem de günlük ekipmanlarda kullanılır.
1. Endüstriyel İmalat
Üretim makineleri tutarlı ürün boyutlarını ve kalitesini korur.Otomatik montaj hatları tekrarlanabilirliği sağlamak için düzenlemeyi kullanır.Bu, israfı azaltır ve verimliliği artırır.
2. Sıcaklık Düzenlemesi
Isıtma ve soğutma ekipmanları konforlu çevre koşullarını korur.Binalar, iç mekan iklimini dengelemek için otomatik ayarlamaya dayanır.Bu, enerji verimliliğini ve konforu artırır.
3. Ulaştırma Sistemleri
Araçlar daha sorunsuz çalışma için hız ve denge kontrolünü kullanır.Modern otomobillerde hız sabitleyici ve çekiş sistemleri bulunur.Bunlar sürüş güvenliğini ve performansını artırır.
4. Güç Sistemleri
Elektrik ağları voltaj ve frekans seviyelerini düzenler.Jeneratörler, yük talebini karşılayacak şekilde çıkışı ayarlar.Bu, istikrarlı elektrik tedariki sağlar.
5. Robotik ve Otomasyon
Robotlar doğru konumlandırma ve hareket görevlerini yerine getirir.Otomatik makineler sürekli olarak yüksek hassasiyetle çalışır.Bu gelişmiş üretime olanak sağlar.
6. Tıbbi Ekipman
Cihazlar tedavi sırasında kontrollü çalışma koşullarını korur.İzleme ekipmanı değerleri güvenli sınırlar içinde tutar.Bu, hasta güvenliğini ve güvenilirliğini artırır.
7. Ev Aletleri
Günlük cihazlar çalışma ayarlarını otomatik olarak yönetir.Çamaşır makineleri ve buzdolapları uygun çalışma koşullarını korur.Bu günlük görevleri basitleştirir.
8. Havacılık ve Uzay Sistemleri
Uçak ve dronlar istikrarlı uçuş koşullarını korur.Otomatik yönlendirme, doğru yönlendirmeyi ve yüksekliği korur.Bu, güvenilir navigasyonu destekler.
Kontrol Sistemi, Otomasyon ve Gömülü Sistemler
Bu teknolojiler birbiriyle yakından ilişkilidir ancak modern elektronik ve endüstriyel ürünlerde farklı mühendislik amaçlarına hizmet etmektedir.
|
Özellik |
Kontrol
Sistem |
Otomasyon |
Gömülü
Sistem |
|
Ana Odak |
Yönetmeliği
değişkenler |
Süreç
infaz |
Cihaz
operasyon |
|
Amaç |
Bakım
istenilen değer |
Görevleri gerçekleştir
otomatik olarak |
Özel olarak çalıştır
işlevler |
|
Kapsam |
Spesifik
süreç davranışı |
Tamamı
iş akışı
|
Tek
ürün cihazı |
|
Karar
Yetenek |
dayalı
ölçülen değerler |
dayalı
programlanmış mantık |
dayalı
donanım yazılımı |
|
Geribildirim Kullanımı |
Sık sık
gerekli |
İsteğe bağlı |
İsteğe bağlı |
|
Donanım Türü |
Sensörler ve
aktüatörler |
Makineler ve
kontrolörler |
Mikrodenetleyici
tahta |
|
Yazılım Rolü |
Hesaplama
ve düzeltme |
Sıralama
ve koordinasyon |
Cihaz
kontrol mantığı |
|
Yanıt Türü |
Sürekli
ayar |
Görev
infaz |
Fonksiyonel çalışma |
|
Sistem Boyutu |
Küçük
orta |
Orta ila
büyük |
Çok küçük |
|
Esneklik |
Orta |
Yüksek |
Sınırlı |
|
Zaman
Gereksinim |
Yüksek |
Orta |
Yüksek |
|
Başvuru
Seviye |
Süreç seviyesi |
Tesis seviyesi |
Ürün seviyesi |
|
Örnek |
Sıcaklık
kontrol |
Fabrika
üretim hattı |
Akıllı saat |
|
Entegrasyon |
Bir kısmı
otomasyon |
İçerir
kontrol sistemleri |
Her ikisini de destekler |
Sonuç
Kontrol sistemleri, gerçek çıktıyı sürekli olarak hedef değerle karşılaştırarak ve herhangi bir hatayı düzelterek kararlılığı korur.Performansları geri bildirim, denetleyici eylemi ve kontrollü süreç gibi temel unsurlara bağlıdır.Farklı sınıflandırmalar, sinyallerin nasıl ele alınacağını ve sistemin bozulmalara ne kadar doğru yanıt vereceğini tanımlar.Bu yetenekleri nedeniyle kontrol sistemleri endüstride, ulaşımda, enerjide, tıbbi cihazlarda ve günlük ekipmanlarda yaygın olarak kullanılmaktadır.
Hakkımızda
ALLELCO LIMITED
Daha fazla oku
Hızlı soruşturma
Lütfen bir soruşturma gönderin, hemen yanıt vereceğiz.
Sıkça Sorulan Sorular [FAQ]
1. Kontrolör ile kontrol sistemi arasındaki fark nedir?
Kontrolör yalnızca karar verme cihazıdır (PLC veya PID kontrol cihazı gibi).Bir kontrol sistemi, kontrolörün yanı sıra sensörleri, aktüatörleri ve düzenlenen süreci içerir.
2. PID kontrolü nedir ve neden önemlidir?
PID kontrolü, hatayı hızlı ve sorunsuz bir şekilde en aza indirmek için orantısal, integral ve türevsel eylemleri kullanır.Çoğu endüstriyel sistemde kararlılığı, doğruluğu ve tepki hızını artırır.
3. Kontrol sistemleri neden bazen salınım yapıyor veya avlanıyor?
Düzeltmeler çok agresif veya geciktiğinde salınım meydana gelir.Kötü ayarlama, yavaş sensörler veya aşırı kazanç, çıkışın tekrar tekrar aşılmasına neden olur.
4. Aktüatör doygunluğu nedir?
Aktüatör doygunluğu, aktüatör fiziksel sınırına ulaştığında ve çıkışı daha fazla artıramadığında meydana gelir.Bu, sistemin büyük hataları düzeltmesini engeller.
5. Kontrol sistemleri süreçlerdeki gecikmeleri nasıl ele alıyor?
Düzeltmenin doğru zamanda gerçekleşmesini sağlamak amacıyla gecikmeyi telafi etmek için ayarlama yöntemlerini, filtreleri veya tahmine dayalı algoritmaları kullanırlar.

4,7 kΩ Direnç Kılavuzu: Renk Kodu, Kullanımlar, Test ve Değer Karşılaştırması
2026/02/16'te

Minyatür Devre Kesici (MCB): Çalışma Prensibi, Tipleri, Değerleri ve Seçim Kılavuzu
2026/02/15'te
Popüler Mesajlar
-

Karmaşık talimat kümesi bilgisayarlar: Bilgi işlemini nasıl değiştirdi?
8000/04/18'te 147768
-

USB-C Pinout ve Özellikleri
2000/04/18'te 111996
-
Xilinx Birleşik Simülasyon İlkellerini Kullanma: FPGA Tasarımı ve Simülasyon için Kapsamlı Bir Kılavuz
1600/04/18'te 111351
-
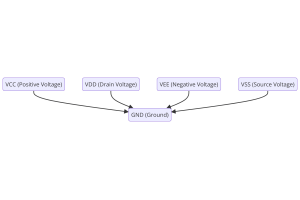
Elektronikte Güç Kaynağı Gerilimleri: VCC, VDD, VEE, VSS ve GND'nin Anlamı
0400/04/18'te 83762
-

RJ45 Bağlayıcı Kılavuzu: Pinout, Kablo, Kablo Türleri ve Kullanımları
1970/01/1'te 79555
-

Modern elektrik sistemlerinde tel renk kodları için nihai kılavuz
Elektrik sistemlerimizin renkleri kullanma şekli sadece görünüm için değil.Her tel rengi artık belirli bir işlevi gösterir, bu da kurulum ve bakım sırasında elektrik bileşenlerini doğru bir şekilde...1970/01/1'te 66956
-

Puraj Valf Kılavuzu: İşlev, Belirtiler, Testler ve Optimal Motor Performansı için Değiştirme
Puraj valfi, bir otomobil sisteminin, atmosfere kaçmadan önce yakıt buharlarını yöneterek havayı temiz tutmaya yardımcı olan önemli bir parçasıdır.Bu sadece kirliliği azaltarak çevreye yardımcı olm...1970/01/1'te 63098
-

Kalite (Q) Faktörü: Denklemler ve Uygulamalar
İndüktörlerin ve rezonatörlerin radyo frekanslarını (RF) kullanan elektronik sistemlerde ne kadar iyi çalıştığını kontrol ederken kalite faktörü veya 'Q' önemlidir.'Q', bir devrenin enerji kaybını ...1970/01/1'te 63029
-
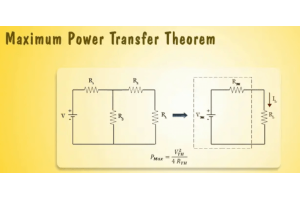
Maksimum güç transfer teoremiyle en yüksek performansı elde etmek
Maksimum güç aktarımı teoremi, bir kaynaktan akü veya jeneratör gibi enerjinin bağlı bir yüke nasıl aktığını açıklar.Yükün en fazla gücü aldığı tam durumu gösterir.Bu makale, teoremin ne anlama gel...1970/01/1'te 54095
-

A23 Pil Özellikleri ve Uyumluluk
A23 pil, yüksek voltajlı küçük, silindir şeklindeki bir pildir.23A, 23ae veya Mn21 olarak da adlandırılır, 12 volt ve AA veya AAA pillerinden çok daha yüksek çalışır.Özel tasarımı, küçük a...1970/01/1'te 52176
Sıcak Parça Numarası
-

1N3292A
Powerex Inc.
DIODE GEN PURP 500V 100A DO205AA
CC0603KRX7R9BB151
YAGEO
CAP CER 150PF 50V X7R 0603
SKY65342-31
Skyworks Solutions Inc.
FEM FRONT END MODULE 12-MCM
RT9715GGB
Richtek USA Inc.
IC PWR SWITCH N-CHAN 1:1 SOT23-5
SDC1740-411B
Analog Devices Inc.
IC S/D CONVERTER 14BIT 32DIP
PIC24FJ32GA002-I/SP
Microchip Technology
IC MCU 16BIT 32KB FLASH 28SPDIP
SMBJ60CA
Littelfuse Inc.
TVS DIODE 60VWM 96.8VC DO214AA
2SD1758TLQ
Rohm Semiconductor
TRANS NPN 32V 2A CPT3
LM3646YFQR
Texas Instruments
IC LED DRV RGLTR I2C 20DSBGA
SI4704-D50-GMR
Skyworks Solutions Inc.
RF RCVR FM 64MHZ-108MHZ 20QFN
VE-J34-CY
Vicor Corporation
DC DC CONVERTER 48V 50W
CD74HC10M96
Texas Instruments
IC GATE NAND 3CH 3-INP 14SOIC
LF-215P
KEMET
POWER LINE FILTER, RFI FILTER, E
TOP244GN-TL
Power Integrations
IC OFFLINE SWITCH FLYBACK 8SMD
ADM1030ARQ-REEL7
onsemi
IC SNSR TEMP/FAN PWM CTRL 16QSOP
LM2904VQPWRQ1
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8TSSOP
IPL60R075CFD7AUMA1
Infineon Technologies
MOSFET N-CH 600V 33A 4VSON
ASSR-3220-002E
Broadcom Limited
SSR RELAY SPST-NO 200MA 0-250V -

PGA206PA
Texas Instruments
IC INST AMP 1 CIRCUIT 16DIP
15KP36A
Littelfuse Inc.
TVS DIODE 36VWM 59.7VC P600
TPS74701DRCR
Texas Instruments
IC REG LIN POS ADJ 500MA 10VSON
TLC27M4BIDR
Texas Instruments
IC OPAMP GP 4 CIRCUIT 14SOIC
MPC8241LVR166D
NXP USA Inc.
IC MPU MPC82XX 166MHZ 357BGA
SN65220IDBVRQ1
Texas Instruments
TVS DEVICE MIXED 7V SOT23-6
1N1365A
Microchip Technology
VOLTAGE REGULATOR
ADS1100A0IDBVR
Texas Instruments
IC ADC 16BIT SIGMA-DELTA SOT23-6
GBPC3506W
onsemi
BRIDGE RECT 1P 600V 35A GBPC-W
IRL3714ZL
Infineon Technologies
MOSFET N-CH 20V 36A TO262
MC74HC244AF
onsemi
IC BUF NON-INVERT 6V SOEIAJ-20
GRM1555C1H4R4WA01D
Murata Electronics
CAP CER 4.4PF 50V C0G/NP0 0402
SLVU2.8HTG
Littelfuse Inc.
TVS DIODE 2.8VWM 15VC SOT23-3
LP2986AIM-3.0
Texas Instruments
IC REG LINEAR 3V 200MA 8SOIC
BFC237321335
Vishay Beyschlag/Draloric/BC Components
CAP FILM 3.3UF 10% 100VDC RADIAL
ASSR-4118-003E
Broadcom Limited
SSR RELAY SPST-NO 100MA 0-400V
PSS1R5-5-3R3
TDK-Lambda Americas Inc
DC DC CONVERTER 3.3V 1.3W
MIC29201-4.8BU
Microchip Technology
IC REG LIN 4.85V 400MA TO263-5 -

HMC287MS8ETR
Analog Devices Inc.
IC AMP BLUETOOTH 2.4GHZ 8MSOP
MIC37301-1.5BR
Microchip Technology
IC REG LINEAR 1.5V 3A SPAK-5
SA30CA
Taiwan Semiconductor Corporation
TVS DIODE 30VWM 64.3VC DO204AC
CAT24C512YE-GT3
onsemi
IC EEPROM 512KBIT I2C 8TSSOP
TPS627451DSSR
Texas Instruments
IC REG BUCK PROG 300MA 12WSON
62684-451100ALF
Amphenol ICC (FCI)
CONN FPC BOTTOM 45POS 0.5MM R/A
W25Q80BVDAIG
Winbond Electronics
IC FLASH 8MBIT SPI/QUAD 8DIP
LT3474IFE#PBF
Analog Devices Inc.
IC LED DRVR RGLTR PWM 1A 16TSSOP
1N2443R
Solid State Inc.
DIODE GEN PURP REV 400V 150A DO8
LMK1D2108RGZT
Texas Instruments
IC CLK BUFFER 2:8 2GHZ 48VQFN
GCM1885G1H561JA16D
Murata Electronics
CAP CER 560PF 50V X8G 0603
MMUN2231LT1G
Rochester Electronics, LLC
MMUN2231 - DIGITAL BJT NPN - PRE
VT5202-M3/4W
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 200V 5A TO220AC
XC95216-10HQ208C
AMD
IC CPLD 216MC 10NS 208QFP
XC6209F272MR-G
Torex Semiconductor Ltd
IC REG LINEAR 2.7V 300MA SOT25
TSM921CUA+T
Touchstone Semiconductor
IC COMPARATOR
06033C473MAT2A
KYOCERA AVX
CAP CER 0.047UF 25V X7R 0603
ADUM3200CRZ
Analog Devices Inc.
DGTL ISO 2500VRMS 2CH GP 8SOIC