TB6600HG Step Motor Sürücüsü: Özellikler, Özellikler ve Uygulamalar
Katalog
TB6600HG Açıklama

TB6600HG bir PWM kıyıcı tipi tek çipli bipolar sinüzoidal mikro-taşıma motor sürücüsüdür.2 faz, 1-2 faz, W1-2-faz, 2W1-2-faz ve 4W1-2 faz uyarma modları ile ileri ve ters rotasyon kontrolü elde edebilir.2 fazlı bipolar step motorlar sadece düşük vibrasyon, yüksek verimli bir saat sinyali ile yönlendirilir.
Alternatifler ve eşdeğerler:
• TB6600FG
• L6258EX
TB6600HG özellikleri
• Parça Durumu: Aktif
• Ambalaj: Tepsi
• Paket / vaka: HZIP-25
• Üretici: Toshiba
• İşletim Beslemesi Akımı: 4.2 Ma
• İşletim besleme voltajı: 2 V ila 5.5 V
• Yük voltajı derecesi: 8 V ila 42 V
• Çıkış sayısı: 2 çıkış
• PD - Güç dağılımı: 40 W
• Montaj Stili: Delikten
• Paket uzunluğu/genişlik/yükseklik: 29.3mm (maks) /4.5mm/15.7mm
• Ürün kategorisi: motor / hareket / ateşleme denetleyicileri ve sürücüler
TB6600HG çalışma koşulları
(TA = -30 ° C ila 85 ° C)
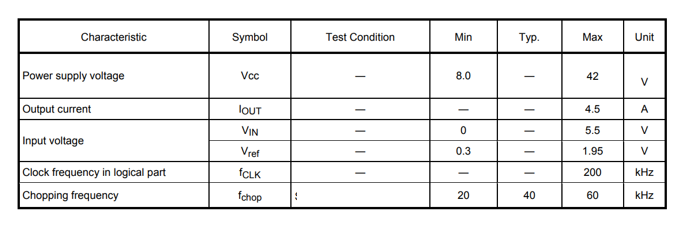
Not: İki VCC terminali aynı voltaj programlanmalıdır.Çıkış akımı, güç dağıtımı PD ile sınırlı olduğundan, çalışma aralığının maksimum akımı mutlaka çeşitli koşullara bağlı olarak yapılamaz.IC'yi, sıcaklığın TJ (AVG.) = 107 ° C'yi aşmasına neden olacak durumda kullanmaktan kaçındığınızdan emin olun.
42 V güç kaynağı voltajı ve 4.5 A çıkış akımı, çalışma aralığının maksimum değerleridir.IC'nin güç kaynağı varyasyonu, dış direnci ve elektriksel özelliklerini göz önünde bulundurarak lütfen devreyi bu aralıkta yeterli miktarda tasarlayın.42 V güç kaynağı voltajını ve 4.5 A çıkış akımını aşması durumunda, IC normal şekilde çalışmaz.
TB6600HG'yi kontrol sistemine nasıl bağlar?
Güç Bağlantısı: İlk olarak, TB6600HG'ye uygun güç kaynağı sağladığınızdan emin olun.TB6600HG'ye güç verirken, genellikle iki pimi bağlamanız gerekir: VCC (Pozitif Güç Kaynağı) ve GND (Toprak Teli).VCC pimi, çipi sürmek için gereken voltajı sağlamaktan sorumludur, GND pimi referans zemin seviyesi olarak hizmet eder.Güç kaynağının sabit olduğundan ve TB6600HG'nin özelliklerini karşıladığından emin olmalıyız.
Sinyal Bağlantısı: Kontrol sisteminin spesifik ihtiyaçlarına göre, kontrol sinyalini TB6600HG sürücü çipinin karşılık gelen pimine bağlamamız gerekir.Bu kontrol sinyalleri genellikle, motorun dönüş yönü ve rotasyon hızı da dahil olmak üzere nasıl hareket ettiğini öğretmekten sorumlu yön kontrol sinyalleri ve adım darbe sinyalleri vb.
Motor bağlantısı: Motoru TB6600HG sürücü çipine bağlarken özellikle dikkatli olmalıyız.Motorun iki kablosu, genellikle kırmızı ve siyah, motorun sırasıyla pozitif ve negatif kutuplarını temsil eder.Kırmızı tel genellikle motorun pozitif terminaline bağlanırken, siyah tel negatif terminale bağlanır.
Geribildirim bağlantısı (isteğe bağlı): Geri bildirim kontrolü için bir kodlayıcı kullanılıyorsa, kodlayıcının çıktı sinyalini kontrol sistemine bağlamamız gerekir.Bu tipik olarak Faz A, Faz B ve Faz Z'nin çıktılarını içerir (varsa).
Topraklama: Girişim ve hasarı önlemek için tüm ekipmanların ortak toprak kablosunun doğru şekilde bağlandığından emin olmalıyız.
Başlatma Ayarları: Bağlantı tamamlandıktan sonra, doğru çalıştığından emin olmak için TB6600HG ayarlarını başlatmamız gerekir.Bu, akım sınırlarının ayarlanmasını, basamak modlarını vb. İçerebilir.
TB6600HG ürün özellikleri
• İyi ısı dağılması için genişlemiş bir radyatör benimseyin
• Altbölüm kurulumu talimatları, tahtanın arkasına yazdırılır
• Çıktı kısa devre koruma fonksiyonu ile endişesiz kullanım
• Senkronizasyon kaybı olmadan yüksek hız sağlamak için 6N137 Yüksek Hızlı Optik Bağlantıyı benimseyin
• Çıktı akımı, çeşitli başvuru ihtiyaçlarınızı karşılamak için aşamalı olarak ayarlanabilir
• Ortak anot giriş modunu kullanarak, kablolamayı daha kolay hale getiren iki giriş terminali vardır
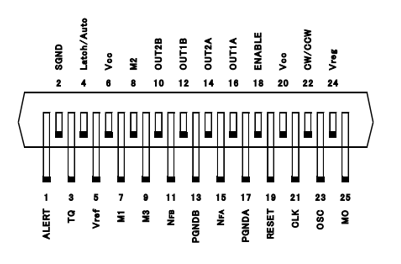
TB6600HG PIN Yapılandırması
TB6600HG'nin işlev tanımı
Uyarma Ayarları
Uyarma modu, M1, M2 ve M3 girişleri kullanılarak aşağıdaki sekiz moddan seçilebilir.Motor çalışması sırasında M1, M2 veya M3 girişleri kaydırıldığında, yeni bir uyarma modu başlangıç modundan başlar ve potansiyel olarak çıkış akımı dalga formunun sürekliliğini bozar.
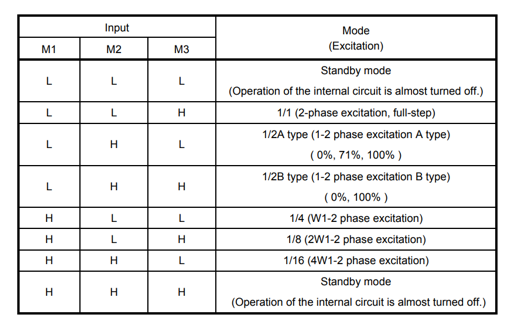
Not: M1, M2 ve M3'ü değiştirerek heyecan verici modu değiştirmek için M1 = M2 = M3 = L veya M1 = M2 = M3 = H ayarlamadığınızdan emin olun.
Bekleme modu
Çalışma modu, m1 = m2 = m3 = l veya m1 = m2 = m3 = h. Durumu altında bekleme moduna geçer. Güç tüketimi, işlemi koruma dışındaki tüm işlemleri kapatarak en aza indirilir.Bekleme modunda, çıkış terminali MO Hz'dir.Bekleme modu, M1 = M2 = M3 = L ve M1 = M2 = M3 = H durumunu diğer duruma değiştirerek serbest bırakılır.Bekleme modunu serbest bıraktıktan sonra giriş sinyali yaklaşık 200 μs kabul edilmez.
Bozulma modu
PWM modunda bir akımın şarj edilmesi ve boşaltılması tipik olarak OSCM'de yaklaşık beş döngü gerektirir.Yüzde 40 hızlı bozulma modu, hızlı bozulma modunun son iki döngüsünde bozulma indüklenerek başlatılır ve yüzde 40 oranında sabit kalır.Ana saat frekansı (FMCLK), OSCM frekansı (FOSCM) ve PWM frekansı (FCHOP) arasındaki ilişki aşağıdaki gibi gösterilmiştir:
foscm = 1/20 × fmclk
FCHOP = 1/100 × FMCLK
ROSC = 51KΩ olduğunda, ana saat = 4MHz, OSCM = 200kHz, PWM (FCHOP) = 40kHz frekansı.
İlk mod
Sıfırlama kullanıldığında, faz akımları aşağıdaki gibidir.
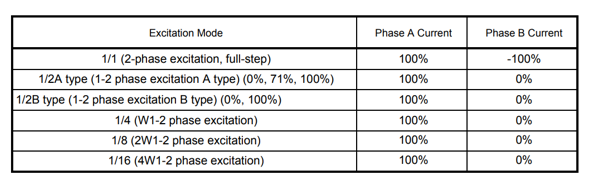
Akım yönü aşağıdaki gibi tanımlanır.
Out1a → Out2a: İleri yön
Out1b → Out2b: İleri yön
TB6600HG uygulaması
Aşağıda TB6600HG'nin bazı uygulamaları listelenmiştir.
• Kuyruk ışıkları
• Konukseverlik binaları
• Büyük dış mekan LED ekranı
• HID ışıklarına alternatif
• Endüstriyel yüksek-bay ışıkları
• Geniş format LED arka aydınlatma
• LED arka aydınlatmayı görüntüle
• Kamera özellikli akıllı telefonlar
• Step-up veya indirme sürücü topolojileri
TB6600HG'nin ortak hataları ve çözümleri
Aşağıda, TB6600HG ile ilgili bazı yaygın hatalar ve hatalarla karşılaşırken hızlı işlem yapmanıza ve cihazın normal çalışmasını korumanıza yardımcı olacak çözümleri listelenir.
Başarısızlık: Sürücü çipi aşırı ısınma
TB6600HG çipinin kendisi çok sıcaktır, muhtemelen aşırı yük veya zayıf ısı yayma koşulları nedeniyle.
Çözüm: Isı dağılmasını geliştirin
Çalışırken ısıyı tamamen dağıtabilmelerini sağlamak için sürücü çipine ve motora ısı lavaboları veya fan eklememiz gerekir.Aynı zamanda, aşırı ısınmayı önlemek için çevreyi sürücü çipinin ve motorun iyi havalandırmasını sağlamak zorundayız.
İkinci Arıza: Motor yanlış yönde döner
Motor tahrik sinyalini aldıktan sonra, dönme yönü beklenenle uyumlu değildir, kontrol sinyali yanlış olabilir veya sürücü çipi düzgün yapılandırılmamış olabilir.
Çözüm: Kontrol sinyalini kontrol edin
Yön kontrol sinyalinin ve nabız sinyalinin doğru olduğundan emin olmak için TB6600HG'ye gönderilen kontrol sinyallerini dikkatlice kontrol etmemiz gerekir.Sinyalleri göndermek için bir mikrodenetleyici kullanılırsa, lütfen program kodunu ve PIN yapılandırmasını kontrol edin.
Üçüncü Arıza: Motor dönemiyor
Motor tahrik sinyalini aldıktan sonra yanıt vermez, sürücü çipinin düzgün çalışmadığı veya motor ile sürücü çipi arasındaki bağlantıda bir sorun olması olabilir.
Çözüm: Güç kaynağını ve bağlantısını kontrol edin
TB6600HG'nin güç kaynağının normal olduğundan ve motor ve sürücü çipi arasındaki bağlantının sağlam olduğundan emin olmalıyız.Normal aralıkta olduklarından emin olmak için bir multimetre kullanarak devredeki voltajı ve akımı kontrol ediyoruz.
Dördüncü Arıza: Ciddi Motor Isıtma
Motor, aşırı akım veya zayıf ısı dağılmasından kaynaklanabilecek çalışma sırasında aşırı ısı üretir.
Çözüm: Geçerli ayarı ayarlayın
Motor ciddi ısı üretiyorsa, sürücü çipinin çıkış akımını azaltmaya çalışabiliriz.TB6600HG'nin geçerli ayar pinini ayarlayarak, çıkış akımının boyutunu etkili bir şekilde sınırlayabiliriz, bu da motor üzerindeki yükü azaltır ve motorun kararlı ve güvenli çalışmasını sağlar.
Sık sorulan sorular [SSS]
1. TB6600HG'nin çalışma sıcaklığı aralığı nedir?
TB6600HG'nin çalışma sıcaklığı -30 ° C ila 85 ° C arasında değişir.
2. TB6600HG nedir?
TB6600HG, CNC makineleri, 3D yazıcılar, robotik ve otomasyon sistemleri gibi çeşitli uygulamalarda step motorlarını kontrol etmek için tasarlanmış bir tür step motor sürücüsüdür.
3. TB6600HG'nin temel özellikleri nelerdir?
TB6600HG özellikleri arasında ayarlanabilir motor akımı, adım çözünürlük ayarları, yerleşik aşırı ısınma koruması ve sinyal kontrolü için opto izole girişler bulunur.