LPC84x Başlangıç Gücü Sorunlarını ve Tam Güçlendirme Sırasını Anlamak
LPC84x mikrodenetleyicileri, işlem gücünü, belleği ve çevre birimlerini kompakt bir cihazda birleştirdiklerinden gömülü sistemlerde yaygın olarak kullanılır.Güvenilir çalışmayı sağlamak için mikro denetleyicinin nasıl başlatıldığını ve güç koşullarının davranışını nasıl etkilediğini anlamanız gerekir.Bu makalede, LPC84x mikro denetleyicilerinin temel özellikleri ve mimarisinin yanı sıra güç kaynağı gereksinimleri, sıfırlama mekanizmaları ve başlatma sırası açıklanmaktadır.Ayrıca, başlangıçtaki güç sorunları ve bunları gidermenin pratik yolları da tartışılmaktadır.Katalog

Şekil 1. LPC84x Mikrodenetleyici
LPC84x Başlangıç Gücü Sorunlarına Genel Bakış
LPC84x mikro denetleyicileri, işleme kapasitesini, belleği ve çevre birimlerini kompakt ve enerji açısından verimli bir cihazda birleştirdiklerinden gömülü sistemlerde yaygın olarak kullanılır.Bununla birlikte, güvenilir çalışma büyük ölçüde istikrarlı ve iyi kontrol edilen bir güç verme sürecine bağlıdır.Başlatma sırasında dengesiz besleme voltajı, uygun olmayan voltaj artış hızı veya tutarsız sıfırlama koşulları gibi sorunlar mikro denetleyicinin nasıl başlatıldığını etkileyebilir.Bu koşullar cihazın normal çalışmasına engel olabilir veya sistem önyüklemesini geciktirebilir.
LPC84x Mikrodenetleyicilerin Özellikleri
1. ARM Cortex-M0+ Çekirdek
LPC84x serisi, düşük güç tüketimi ve verimli performans için optimize edilmiş ARM Cortex-M0+ işlemci temel alınarak üretilmiştir.Bu 32 bitlik çekirdek, hızlı kesme işlemeyi ve deterministik yürütmeyi destekleyerek gömülü uygulamalar için uygun hale getirir.Basit mimarisi, güvenilir işleme yeteneklerini korurken kompakt aygıt yazılımı oluşturmaya olanak tanır.Çekirdek ayrıca daha kolay programlama ve hata ayıklama için standart ARM geliştirme araçlarını da destekler.
2. Gömülü Flash Bellek
Bu mikro denetleyiciler, program kodunu ve ürün yazılımını depolamak için kullanılan çip üzerinde flash belleği içerir.Dahili flaş genellikle harici bellek aygıtlarına ihtiyaç duymadan gömülü uygulamalar için yeterli alan sağlar.Entegre flaş, talimatlara daha hızlı erişim sağlar ve genel sistem verimliliğini artırır.Mikrodenetleyicinin programlama sonrasında bağımsız olarak çalışabilmesi nedeniyle donanım tasarımını da basitleştirir.
3.SRAM Bellek
LPC84x ailesi, çalışma zamanı veri depolama ve yığın işlemleri için dahili SRAM'ı entegre eder.Bu bellek değişkenlere, arabelleklere ve geçici işleme verilerine hızlı erişim sağlar.Hızlı SRAM, CPU'nun harici belleği beklemeden verilere erişebilmesi nedeniyle yürütme hızını artırır.Ayrıca gömülü uygulamalar içindeki çoklu görev işlemlerini de destekler.
4. Esnek Seri İletişim Arayüzleri
Harici cihazları ve modülleri bağlamak için birden fazla iletişim çevre birimi mevcuttur.Bunlar arasında seri iletişim için UART arayüzleri, yüksek hızlı çevre birimi iletişimi için SPI arayüzleri ve sensör ve kontrol ağları için I²C arayüzleri bulunur.Bu yerleşik iletişim blokları, yerleşik tasarımlarda donanım entegrasyonunu basitleştirir.Ekranları, sensörleri, bellek aygıtlarını ve diğer dijital bileşenleri bağlamak için kullanılabilir.
5. Analog Çevre Birimi Desteği
LPC84x mikro denetleyicileri, 12 bitlik Analog-Dijital Dönüştürücü (ADC) gibi entegre analog özellikler içerir.Bu, cihazın sensörlerden veya harici devrelerden gelen analog sinyalleri ölçmesine olanak tanır.Bazı varyantlar ayrıca analog çıkışlar oluşturmak için Dijital-Analog Dönüştürücü (DAC) işlevselliğini de içerir.Bu yetenekler mikro denetleyicinin sinyallerle doğrudan arayüz oluşturmasını sağlar.
6. Esnek G/Ç Yapılandırması
Genel amaçlı giriş/çıkış (GPIO) pinleri, mikro denetleyicinin harici donanım bileşenleriyle etkileşime girmesini sağlar.LPC84x, birden fazla fonksiyonun tek bir pime atanmasına olanak tanıyan esnek pim yapılandırma özellikleri içerir.Bu esneklik, PCB düzenlerinin optimize edilmesine ve mevcut çevre birimlerinin maksimum düzeye çıkarılmasına yardımcı olur.GPIO pinleri dijital giriş, çıkış veya alternatif çevresel işlevler için yapılandırılabilir.
7. Düşük Güçte Çalışma Modları
Pille çalışan uygulamalarda enerji tüketimini azaltmak için düşük güç modları dahildir.Bu modlar, mikro denetleyicinin kullanılmayan çevre birimlerini devre dışı bırakmasına veya boşta kalma süreleri sırasında sistem saat frekansını azaltmasına olanak tanır.Güç yönetimi özellikleri, taşınabilir cihazlarda pil ömrünün uzatılmasına yardımcı olur.Sistem gerektiğinde hızlı bir şekilde aktif çalışmaya dönebilir.
8. Entegre Zamanlayıcı ve Kontrol Modülleri
Zaman ölçümünü, sinyal üretimini ve olay kontrolünü desteklemek için çeşitli zamanlayıcı modülleri entegre edilmiştir.Bunlar arasında çok hızlı zamanlayıcılar, durum yapılandırılabilir zamanlayıcılar ve izleme zamanlayıcıları bulunur.Zamanlayıcılar, motor kontrolü, iletişim zamanlaması veya periyodik görev planlama gibi gömülü sistemlerde hassas zamanlama kontrolü sağlar.Bu modüller sistem güvenilirliğini ve performansını artırır.
LPC84x Blok Diyagramına Genel Bakış
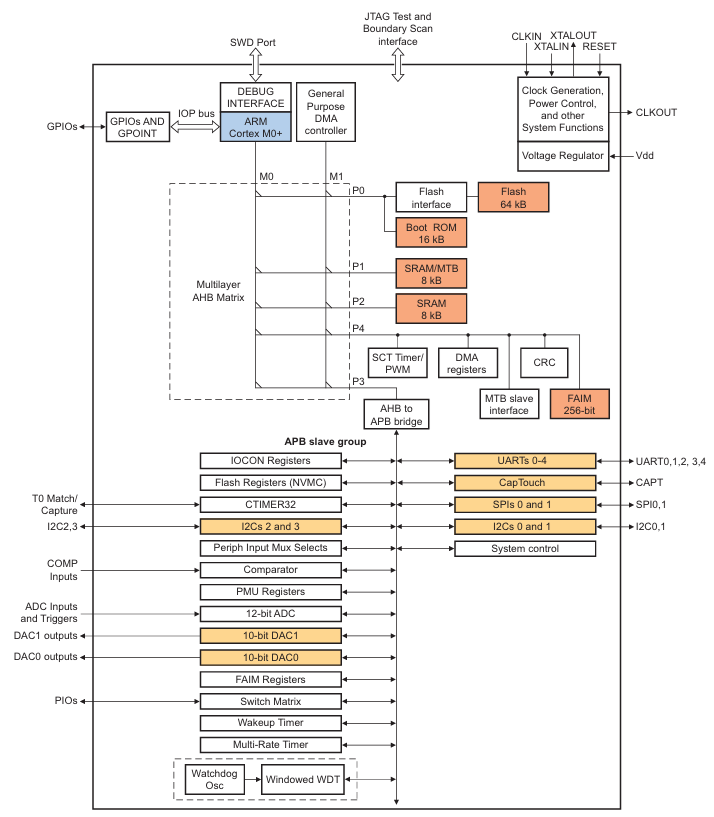
Şekil 2. LPC84x Mikrodenetleyici Blok Şeması
LPC84x mimarisi, yerleşik işleme görevlerini gerçekleştirmek için birlikte çalışan birden çok işlevsel bloğu entegre eder.Sistemin merkezinde, SRAM'den verilere erişirken dahili flash bellekte saklanan program talimatlarını yürüten ARM Cortex-M0+ CPU yer alıyor.Çok katmanlı bir AHB veri yolu matrisi, işlemciyi bellek modülleri ve çevresel arayüzlere bağlayarak dahili bileşenler arasında verimli iletişim sağlar.Saat oluşturma ve güç yönetimi, sistem zamanlamasını kontrol eder ve farklı performans modlarında cihazın kararlı çalışmasını sağlar.SWD gibi hata ayıklama arayüzleri, geliştirme sırasında ürün yazılımının programlanmasına ve test edilmesine olanak tanır.Zamanlayıcılar, iletişim modülleri ve analog arayüzler dahil olmak üzere çeşitli çevre birimleri, harici cihaz etkileşimi sağlamak için dahili veri yolu sistemi aracılığıyla bağlanır.Bu bloklar birlikte verimli gömülü kontrol için tasarlanmış kompakt bir mikro denetleyici mimarisi oluşturur.
LPC84x Güç Kaynağı Gereksinimleri
|
Parametre |
Sembol |
Tipik / Aralık |
|
Besleme Gerilimi |
VDD |
1,8 V – 3,6 V |
|
Analog Besleme Gerilimi |
VDDA |
1,8 V – 3,6 V |
|
Çalışma Gerilimi (Tipik) |
VDD |
3,3V |
|
Açılış Gerilimi Eşiği |
VPOR |
~1,5 V (tipik) |
|
Brown-Out Gerilim Seviyesi |
VBOR |
Yapılandırılabilir (~1,7–2,7 V) |
|
Aktif Mod Akımı |
ID |
Cihaza bağlı |
|
Derin Uyku Akımı |
ID(DS) |
Çok düşük (μA aralığı) |
|
Maksimum GPIO Gerilimi |
VIO |
VDD'ye kadar |
|
Çalışma Sıcaklığı Aralığı |
TA |
−40°C ila +105°C |
|
Önerilen Dekuplaj Kondansatörü |
— |
Her VDD pininin yakınında 0,1 µF |
LPC84x Kaynakları Sıfırlama ve Başlatma Davranışı
Açılışta Sıfırlama (POR)
Açılışta Sıfırlama (POR), LPC84x mikro denetleyicisine ilk kez güç uygulandığında otomatik olarak etkinleşen dahili bir sıfırlama mekanizmasıdır.Ana amacı, besleme voltajı güvenli bir çalışma seviyesine ulaşana kadar sistemi sıfırlama durumunda tutmaktır.Cihaza güç verildiğinde, POR devresi besleme voltajını izler ve CPU'nun talimatları zamanından önce yerine getirmesini engeller.Voltaj stabil hale geldiğinde sıfırlama durumu ortadan kalkar ve işlemci, dahili flash bellekten kod çalıştırmaya başlar.Bu, güç uygulandıktan sonra mikro denetleyicinin her zaman öngörülebilir bir durumda başlamasını sağlar.Dahili mimaride sıfırlama sistemi, normal çalışma başlamadan önce saat ve güç yönetimi bloklarıyla etkileşime girer.Bu mekanizma LPC84x başlatma işleminin temelini oluşturur.
Brown-Out Sıfırlama (BOR)
Brown-Out Reset (BOR), besleme voltajı güvenli bir çalışma eşiğinin altına düştüğünde LPC84x mikro denetleyicisini sıfırlayan bir koruma mekanizmasıdır.Amacı, CPU'nun öngörülemeyen davranışlara neden olabilecek dengesiz voltaj koşulları altında çalışmasını önlemektir.Gerilim yapılandırılan seviyenin altına düştüğünde BOR devresi, belleği ve çevre birimlerini korumak için sistemin sıfırlanmasını tetikler.Besleme voltajı sabit bir seviyeye döndükten sonra cihaz normal şekilde yeniden başlatılır.Bu özellik, güç dalgalanmalarının meydana gelebileceği sistemlerde güvenilir çalışmanın korunmasına yardımcı olur.Dahili mimaride voltaj izleme devreleri, düşük voltaj koşullarını tespit etmek için güç kontrol bloğunun yanında çalışır.Sonuç olarak mikrodenetleyici geçici voltaj düşüşlerinden güvenli bir şekilde kurtulabilir.
Harici Sıfırlama Pimi (RESET)
Harici RESET pini, LPC84x mikro denetleyicisini çipin dışından sıfırlamak için bir donanım yöntemi sağlar.Gerektiğinde harici cihazların veya kontrol sinyallerinin mikro denetleyiciyi sıfırlama durumuna zorlamasını sağlar.RESET sinyali aktif hale geldiğinde işlemci talimatları yürütmeyi durdurur ve başlangıç başlangıç durumuna geri döner.Bu, belirli operasyonel olaylar sırasında sistemin temiz bir şekilde yeniden başlatılabilmesini sağlar.Sıfırlama sinyali serbest bırakıldıktan sonra cihaz, ürün yazılımını tekrar çalıştırmadan önce dahili başlatma işlemini gerçekleştirir.Harici sıfırlama kontrolü genellikle programlama, hata ayıklama veya sistem denetimi sırasında kullanılır.Dahili sistem yapısı içerisinde bu sıfırlama yolu doğrudan merkezi sıfırlama kontrolörüne bağlanır.
Watchdog'u Sıfırla
Watchdog zamanlayıcısı sistem yazılımının artık doğru şekilde çalışmadığını tespit ettiğinde watchdog sıfırlaması gerçekleşir.Watchdog zamanlayıcısı, çalışan bellenimden periyodik güncellemeler talep ederek programın yürütülmesini sürekli olarak izler.Yazılım beklenen süre içinde zamanlayıcıyı yenileyemezse zamanlayıcının süresi dolar ve sistem sıfırlamasını tetikler.Bu mekanizma, sistemi yazılım çökmelerinden, sonsuz döngülerden veya beklenmeyen ürün yazılımı hatalarından korur.Sıfırlama gerçekleştikten sonra mikrodenetleyici yeniden başlatılır ve programı tekrar çalıştırmaya başlar.İç mimaride watchdog zamanlayıcısı, sistem kontrol mantığı ve zamanlayıcılarla birlikte çalışır.Amacı, genel sistem güvenilirliğini artırmak ve gömülü sistemlerde sürekli çalışmayı sürdürmektir.
LPC84x Güçlendirme Sırası
1. Güç Kaynağı Stabilizasyonu
Cihaza ilk voltaj uygulandığında, dahili devrelerin besleme voltajının dengelenmesi için kısa bir süreye ihtiyacı vardır.Bu aşamada dahili düzenleyiciler ve güç yönetimi blokları CPU ve çevre birimleri için uygun voltaj seviyelerini belirler.Bu stabilizasyon gerçekleşirken mikrodenetleyici devre dışı kalır.Bu, erken çalıştırma aşamasında güvenilmez davranışları önler.Kararlı voltaj, dahili mantık devrelerinin doğru şekilde çalışabilmesini sağlar.
2. Açılışta Sıfırlama Aktivasyonu
Besleme stabil hale gelmeye başladıktan sonra, Açılışta Sıfırlama devresi işlemciyi sıfırlama durumunda tutar.Bu sıfırlama, voltaj güvenli bir seviyeye ulaşana kadar CPU'nun talimatları yürütmesini engeller.Sıfırlama kontrolörü bu aşamada besleme gerilimini sürekli olarak izler.Yalnızca voltaj gerekli eşiği aştığında sıfırlama serbest bırakılmaya başlar.Bu, mikro denetleyicinin temiz bir sistem durumuyla başlamasını garanti eder.
3. Dahili Saat Başlatma
Sıfırlama koşulları temizlendikten sonra mikro denetleyici dahili saat sistemini başlatır.Saat üreteci, CPU ve çevresel işlemler için zamanlamayı sağlayan dahili osilatörü başlatır.Bu saat, sistemin yürütülmesi için ana zamanlama referansı haline gelir.İşlemci, kararlı bir saat kaynağı olmadan talimatları çalıştıramaz.Bu nedenle saatin başlatılması, sistem başlatılmasının önemli bir aşamasıdır.
4. Bellek Başlatma
Bir sonraki aşamada işlemci, programın kullandığı dahili bellek yapılarını hazırlar.Flash bellek ürün yazılımı talimatlarını sağlarken, SRAM çalışma zamanı verilerini depolar.Sistem ayrıca kesme yönetimi için kullanılan vektör tablosunu da hazırlar.Bu bellek kurulumu, işlemcinin program giriş noktasını doğru şekilde bulmasını sağlar.Belleğin uygun şekilde başlatılması, ürün yazılımının sorunsuz şekilde yürütülmesini sağlar.
5. Çevresel Başlatma
Bellek hazırlığının ardından sistem önemli dahili çevre birimlerini etkinleştirir.Bu çevre birimleri, bellenimin gerektirdiği zamanlayıcıları, iletişim modüllerini ve kontrol kayıtlarını içerebilir.Uygulama yazılımı onları etkinleştirene kadar bazı çevre birimleri devre dışı kalır.Başlatma aşaması, temel sistem ortamının hazır olmasını sağlar.Bu adım, cihazı uygulama yürütmeye hazırlar.
6. Aygıt Yazılımının Yürütülmesi Başlıyor
Tüm dahili başlatma adımları tamamlandıktan sonra işlemci, flash bellekte saklanan ürün yazılımını çalıştırmaya başlar.Yürütme genellikle program kodunda tanımlanan sıfırlama vektöründen başlar.Bu noktadan itibaren gömülü uygulama sistemin çalışmasını kontrol eder.Ürün yazılımı, çevre birimlerini yapılandırır, giriş sinyallerini işler ve sistem görevlerini gerçekleştirir.Bu, donanım başlangıcından uygulama çalışma zamanına geçişi işaret eder.
Yaygın LPC84x Başlangıç Gücü Sorunları
• Açılış Sırasında Yavaş Gerilim Rampası
Besleme voltajı çok yavaş yükselirse dahili sıfırlama devreleri öngörülemeyen şekilde davranabilir.Yavaş bir rampa hızı, uygun sıfırlamanın serbest bırakılmasını geciktirebilir ve cihazın başlatılmasını etkileyebilir.Bazı sistemlerde CPU, voltaj tamamen stabil hale gelmeden önce başlamayı deneyebilir.Bu tutarsız başlatma davranışına neden olabilir.
• Güç Kaynağı Gürültüsü veya Kararsızlığı
Güç kaynağı hattındaki elektriksel gürültü, mikro denetleyicinin kararlı şekilde başlatılmasını engelleyebilir.Gürültü, istenmeyen sıfırlamaları tetikleyen geçici voltaj düşüşlerine neden olabilir.Bu dalgalanmalar dahili saati ve mantık devrelerini etkileyebilir.Sonuç olarak mikrodenetleyici tekrar tekrar yeniden başlatılabilir.
• Yetersiz Dekuplaj Kapasitörleri
Mikrodenetleyici güç pinlerinin yakınındaki zayıf ayırma, başlatma sırasında dengesiz voltaja neden olabilir.Çipin içindeki hızlı akım değişiklikleri, kaynağı dengelemek için yakındaki kapasitörlere ihtiyaç duyar.Uygun ayırma olmazsa voltaj yükselmeleri meydana gelebilir.Bu kararsızlık sistemin başlatılmasını etkileyebilir.
• Başlatma Sırasında Gerilim Düşmeleri
Güç kaynağı başlatma sırasında yeterli akımı sağlayamazsa voltaj kısa süreliğine düşebilir.Bu durum, kararma sıfırlama koşullarını tetikleyebilir.Bu tür düşüşler sistemdeki diğer bileşenler aynı anda çalışmaya başladığında meydana gelebilir.Bu geçici düşüşler önyükleme işlemini kesintiye uğratabilir.
•Sinyal Kararsızlığını Sıfırla
Çalıştırma sırasında dalgalanan harici sıfırlama sinyalleri tekrarlanan sıfırlamalara neden olabilir.Sıfırlama sinyali sabit kalmazsa mikrodenetleyici başlatma işlemini hiçbir zaman tamamlayamayabilir.Bu, ürün yazılımının normal şekilde yürütülmesini engelleyebilir.Güvenilir başlatma için kararlı sıfırlama koşulları gereklidir.
• Uygunsuz Saat Kaynağı Kullanılabilirliği
Sistem düzgün şekilde çalışmayan harici bir saat kaynağına bağlıysa CPU düzgün çalışmayabilir.Kararlı bir saat sinyali olmadan talimatın yürütülmesi başlayamaz.Bu, sistemin yanıt vermemesine neden olabilir.Normal mikrodenetleyici başlatma için saat kararlılığı önemlidir.
LPC84x Başlatma Sorunlarını Giderme
• Besleme Gerilimi Kararlılığını Doğrulayın
İlk sorun giderme adımı, bir osiloskop veya multimetre kullanarak mikro denetleyici besleme voltajını ölçmektir.Başlatma sırasında voltaj önerilen çalışma aralığında kalmalıdır.Ani düşüşler veya ani yükselişler güç kaynağının dengesizliğine işaret edebilir.Çalıştırma sırasında voltaj dalga biçimini gözlemlemek gizli sorunları ortaya çıkarabilir.Güvenilir mikrodenetleyici başlatma için kararlı voltaj önemlidir.
• Sinyal Zamanlamasını Sıfırla'yı kontrol edin
Sıfırlama sinyali sabit kalmalı ve açma işlemiyle düzgün şekilde senkronize edilmelidir.Çoğu kişi, başlatma sırasında beklendiği gibi davrandığını doğrulamak için sıfırlama pinini sıklıkla izler.Kararsız veya gürültülü bir sıfırlama sinyali sistemi tekrar tekrar yeniden başlatabilir.Sıfırlama zamanlamasının doğrulanması, başlatmanın ancak güç stabil hale geldikten sonra gerçekleşmesini sağlar.Doğru sıfırlama davranışı, doğru sistem önyüklemesini destekler.
• Güç Kaynağı Filtrelemesini Denetleyin
Dekuplaj kapasitörleri gibi güç filtreleme bileşenleri dikkatle incelenmelidir.Bu kapasitörler hızlı akım değişiklikleri sırasında voltajın sabit kalmasına yardımcı olur.Kötü yerleştirme veya yetersiz kapasitans, voltaj gürültüsünün mikro denetleyiciyi etkilemesine neden olabilir.Uygun filtrelemenin sağlanması başlatma güvenilirliğini artırır.Donanım incelemesi sıklıkla eksik veya yanlış yerleştirilmiş kapasitörleri ortaya çıkarabilir.
• Saat Kaynağı İşlemini Onaylayın
İşlemcinin talimatları yürütebilmesi için sistem saatinin doğru şekilde başlaması gerekir.Doğru çalışmayı onaylamak için osilatör sinyallerini kontrol edin.Saat kaynağı başlatılamazsa CPU ürün yazılımını çalıştıramaz.Saat sinyalinin izlenmesi, zamanlama devrelerinin doğru çalışıp çalışmadığının belirlenmesine yardımcı olur.Normal başlatma için güvenilir saat çalışması gereklidir.
• Firmware Başlatma Kodunu İnceleyin
Ürün yazılımının içindeki başlatma kodu, sistem başlatma davranışını etkileyebilir.Sıfırlama işleyicisini ve sistem başlatma rutinlerini gözden geçirin.Sistem kayıtlarının veya çevre birimlerinin yanlış yapılandırılması normal çalışmayı geciktirebilir.Başlangıç kodunun doğrulanması, ürün yazılımının donanımı doğru şekilde başlatmasını sağlar.Yazılım denetimi, donanım hata ayıklamasını tamamlar.
• Hata Ayıklama Araçları ile Başlangıç Davranışını Gözlemleyin
SWD gibi hata ayıklama arayüzleri, başlatma sırasında işlemci aktivitesinin izlenmesine olanak tanır.Hata ayıklama araçlarını kullanarak CPU'nun ana program giriş noktasına ulaşıp ulaşmadığını kontrol edin.Kesme noktaları ve hata ayıklama günlükleri, başlatmanın nerede durduğunu ortaya çıkarmaya yardımcı olur.Bu yöntem, erken başlatma aşamalarında sistem davranışına ilişkin değerli bilgiler sağlar.
Sonuç
LPC84x mikro denetleyicisinin güvenilir şekilde başlatılması, kararlı güce, doğru sıfırlama davranışına ve düzgün çalışan bir saat sistemine bağlıdır.Önemli başlatma aşamaları arasında güç stabilizasyonu, sıfırlamanın serbest bırakılması, saat kurulumu, hafıza hazırlığı ve ürün yazılımının yürütülmesi yer alır.Gerilim düşüşleri, gürültü, zayıf ayırma veya dengesiz sıfırlama sinyalleri gibi sorunlar bu süreci kesintiye uğratabilir.Dikkatli güç tasarımı ve sistematik sorun giderme, tutarlı başlatma ve kararlı sistem çalışması sağlamaya yardımcı olur.
Hakkımızda
ALLELCO LIMITED
Daha fazla oku
Hızlı soruşturma
Lütfen bir soruşturma gönderin, hemen yanıt vereceğiz.
Sıkça Sorulan Sorular [FAQ]
1. LPC84x mikrodenetleyici ne için kullanılır?
LPC84x mikrodenetleyici, düşük güç tüketimi ve kompakt donanım gerektiren gömülü sistemlerde yaygın olarak kullanılır.Tipik uygulamalar arasında endüstriyel kontrol sistemleri, sensör arayüzleri, tüketici elektroniği ve IoT cihazları bulunur.
2. LPC84x mikrodenetleyicilerini programlamak için hangi geliştirme araçları kullanılabilir?
LPC84x cihazlarını Keil MDK, MCUXpresso IDE veya IAR Embedded Workbench gibi ARM uyumlu araçları kullanarak programlayabilirsiniz.Bu ortamlar hata ayıklamayı, derlemeyi ve ürün yazılımı geliştirmeyi destekler.
3. LPC84x mikro denetleyicisi harici bir kristal osilatör gerektiriyor mu?
Hayır, LPC84x, sistem saatini oluşturabilen dahili bir osilatör içerir.Ancak bazı uygulamalar daha yüksek zamanlama doğruluğu için harici bir kristal kullanabilir.
4. LPC84x mikrodenetleyicilerin maksimum saat hızı nedir?
Çoğu LPC84x cihazı yaklaşık 30 MHz'e kadar saat hızlarında çalışır.Bu hız, düşük güç tüketimini korurken verimli işlemeye olanak tanır.
5. LPC84x mikrodenetleyicileri pille çalışan cihazlarda kullanılabilir mi?
Evet, LPC84x cihazları, boşta kalma dönemlerinde enerji tüketimini azaltan birden fazla düşük güç moduyla tasarlanmıştır.Bu onları taşınabilir elektronikler, IoT düğümleri ve pille çalışan gömülü sistemler için uygun hale getirir.

H7 Pil Nedir?Boyut, Özellikler ve Araç Kullanımları
2026/03/10'te
DVI Konektörlerini Anlamak: Bilmeniz Gereken Her Şey
2026/03/9'te
Popüler Mesajlar
-

Karmaşık talimat kümesi bilgisayarlar: Bilgi işlemini nasıl değiştirdi?
8000/04/18'te 147764
-

USB-C Pinout ve Özellikleri
2000/04/18'te 111989
-
Xilinx Birleşik Simülasyon İlkellerini Kullanma: FPGA Tasarımı ve Simülasyon için Kapsamlı Bir Kılavuz
1600/04/18'te 111351
-
Elektronikte Güç Kaynağı Gerilimleri: VCC, VDD, VEE, VSS ve GND'nin Anlamı
0400/04/18'te 83751
-

RJ45 Bağlayıcı Kılavuzu: Pinout, Kablo, Kablo Türleri ve Kullanımları
1970/01/1'te 79546
-

Modern elektrik sistemlerinde tel renk kodları için nihai kılavuz
Elektrik sistemlerimizin renkleri kullanma şekli sadece görünüm için değil.Her tel rengi artık belirli bir işlevi gösterir, bu da kurulum ve bakım sırasında elektrik bileşenlerini doğru bir şekilde...1970/01/1'te 66949
-

Puraj Valf Kılavuzu: İşlev, Belirtiler, Testler ve Optimal Motor Performansı için Değiştirme
Puraj valfi, bir otomobil sisteminin, atmosfere kaçmadan önce yakıt buharlarını yöneterek havayı temiz tutmaya yardımcı olan önemli bir parçasıdır.Bu sadece kirliliği azaltarak çevreye yardımcı olm...1970/01/1'te 63093
-

Kalite (Q) Faktörü: Denklemler ve Uygulamalar
İndüktörlerin ve rezonatörlerin radyo frekanslarını (RF) kullanan elektronik sistemlerde ne kadar iyi çalıştığını kontrol ederken kalite faktörü veya 'Q' önemlidir.'Q', bir devrenin enerji kaybını ...1970/01/1'te 63028
-
Maksimum güç transfer teoremiyle en yüksek performansı elde etmek
Maksimum güç aktarımı teoremi, bir kaynaktan akü veya jeneratör gibi enerjinin bağlı bir yüke nasıl aktığını açıklar.Yükün en fazla gücü aldığı tam durumu gösterir.Bu makale, teoremin ne anlama gel...1970/01/1'te 54092
-

A23 Pil Özellikleri ve Uyumluluk
A23 pil, yüksek voltajlı küçük, silindir şeklindeki bir pildir.23A, 23ae veya Mn21 olarak da adlandırılır, 12 volt ve AA veya AAA pillerinden çok daha yüksek çalışır.Özel tasarımı, küçük a...1970/01/1'te 52172
Sıcak Parça Numarası
-

2108693-4
TE Connectivity AMP Connectors
1.1H SPRING FINGER W/EMBOSS
APXS006A0X-SRZ
ABB Power Electronics Inc.
DC DC CONVERTER 0.6-5.5V 33W
SI4844-B20-GUR
Skyworks Solutions Inc.
RF RX AM/FM 504KHZ-1.75MHZ SSOP
H3LIS331DL
STMicroelectronics
ACCEL 100-400G I2C/SPI 16TFLGA
M29W640GB70NB6E
Micron Technology Inc.
IC FLASH 64MBIT PARALLEL 56TSOP
ST1S40IDR
STMicroelectronics
IC REG BUCK ADJUSTABLE 3A 8SO
FDME820NZT
onsemi
MOSFET N-CH 20V 9A MICROFET
DF5A6.8CJE,LM
Toshiba Semiconductor and Storage
TVS DIODE ESV
ADM6384YKS17D3Z-R7
Analog Devices Inc.
IC SUPERVISOR 1 CHANNEL SC70-4
08055A270GAT2A
KYOCERA AVX
CAP CER 27PF 50V C0G/NP0 0805
MSC8251SVT1000B
NXP USA Inc.
IC PROCESSOR 1-CORE 783FCBGA
0603YA240JAT4A
KYOCERA AVX
CAP CER 24PF 16V NP0 0603
1SS355TE-17
Rohm Semiconductor
DIODE GEN PURP 80V 100MA UMD2
GRM1886S1H3R8CZ01D
Murata Electronics
CAP CER 3.8PF 50V S2H 0603
ADM660ARUZ
Analog Devices Inc.
IC REG CHARGE PUMP INV 16TSSOP
QS3390QG
IDT, Integrated Device Technology Inc
IC MUX/DEMUX 1 X 16:8 28QSOP
SP-2L+
Mini-Circuits
RF PWR DVDR 2.7GHZ-4GHZ SOT23-6
DMP58D0SV-7
Diodes Incorporated
MOSFET 2P-CH 50V 0.16A SOT-563 -

MT46H64M32LFBQ-48 IT:C
Micron Technology Inc.
IC DRAM 2GBIT PAR 208MHZ 90VFBGA
S25FL127SABBHIT00
Infineon Technologies
IC FLASH 128MBIT SPI/QUAD 24BGA
2SC5200-O(Q)
Toshiba Semiconductor and Storage
TRANS NPN 230V 15A TO3P
GRM21BZ71C106KE15L
Murata Electronics
CAP CER 10UF 16V X7R 0805
AT29C512-12JI
Microchip Technology
IC FLASH 512KBIT PARALLEL 32PLCC
1N4550A
Solid State Inc.
DO5 50 WATT ZENER DIODES
TPS628681ARQYR
Texas Instruments
5.5-V 4-A SYNCHRONOUS STEP-DOWN
VLR-02VF
JST Sales America Inc.
CONN RCPT HSG 2POS 6.20MM
2SK3814-Z-E1-AZ
Renesas Electronics America Inc
MP-3 AL
TM4C123GH6PMI
Texas Instruments
IC MCU 32BIT 256KB FLASH 64LQFP
PI3HDX12211ZHEX
Diodes Incorporated
ACTIVE DISPLAY V-QFN3590-42
SST25WF080BT-40I/SN
Microchip Technology
IC FLASH 8MBIT SPI 40MHZ 8SOIC
CS5171EDR8G
onsemi
IC REG MULT CONFG ADJ 1.5A 8SOIC
MP2208DL-LF-Z
Monolithic Power Systems Inc.
IC REG BUCK ADJUSTABLE 4A 14QFN
74F245SCX
onsemi
IC TXRX NON-INVERT 5.5V 20SOIC
CL1200
Transforming Technologies
NO PRINT: 1/2" X 72 YD
FSUSB22BQX
Fairchild Semiconductor
DPDT, 2 FUNC, 1 CHANNEL
GRM219F51E224ZA01D
Murata Electronics
CAP CER 0.22UF 25V Y5V 0805 -

IS45S32400E-7TLA1
ISSI, Integrated Silicon Solution Inc
IC DRAM 128MBIT PAR 86TSOP II
IP4786CZ32Y
Nexperia USA Inc.
IC INTFACE SPECIALIZED 32HVQFN
SMBJ15A-13-F
Diodes Incorporated
TVS DIODE 15VWM 24.4VC SMB
AT28BV64B-20TU
Microchip Technology
IC EEPROM 64KBIT PARALLEL 28TSOP
TPS7A8400ARGRR
Texas Instruments
IC REG LIN POS ADJ/PROG 3A 20QFN
GRM1556R1H6R5CZ01D
Murata Electronics
CAP CER 6.5PF 50V R2H 0402
296406200100856+
KYOCERA AVX
MEMORY CARD
PKLCS1212E2400-R1
Murata Electronics
BUZZER PIEZO 1.5V 12X12MM SMD
LM3670MF-1.8
Texas Instruments
IC REG BUCK 1.8V 350MA SOT23-5
SMAJ18A
Yangzhou Yangjie Electronic Technology Co.,Ltd
TVS DIODE 18VWM 29.2VC DO214AC
CC0402MRX5R7BB104
YAGEO
CAP CER 0.1UF 16V X5R 0402
SP3222EBCT-L/TR
MaxLinear, Inc.
IC TRANSCEIVER FULL 2/2 18SOIC
M50100TB1600
Sensata-Crydom
BRIDGE RECT 3P 1.6KV 100A MODULE
RPIXP2400BAT
Intel
MICROPROCESSOR, PBGA1356
FT24C16A-ULR-T
Fremont Micro Devices Ltd
IC EEPROM 16KBIT I2C SOT23-5
GCJ43DR72J473KXJ1L
Murata Electronics
CAP CER 0.047UF 630V X7R 1812
FDMF5076
onsemi
IC SPS MOD PWR STAGE 35A PQFN24
XC7K410T-L2FFG900I
AMD
IC FPGA 500 I/O 900FCBGA